The intelligent cruise control (ACC = Adaptive Cruise Control) derives its basics from conventional cruise control, which keeps a pre-selected speed constant by an intervention of the engine control. In ACC this function is extended by a distance holding system, which is engaged when the distance to a preceding vehicle falls below a safe limit because of slower velocity.
The preceding vehicle is detected by appropriate sensors in terms of relative distance and speed. The values of relative distance and speed are then transferred to a control system. This control system then decides whether the vehicle is to be accelerated or decelerated, and if so in what measure.
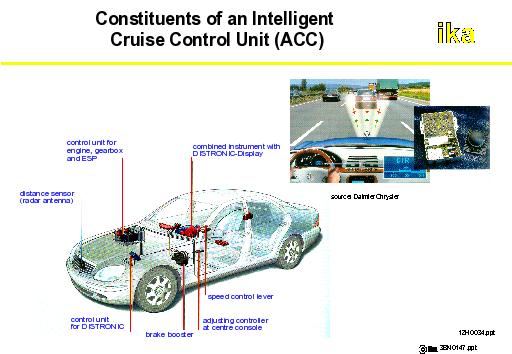
In case of a necessary acceleration it will be engaged in motor control and where required automatic transmission is affected. If the vehicle is decelerated at first automatic transmission is used by gear changing. Furthermore, according to specification of system functions active engagement in the brake is possible. This is realised by a variable brake booster, which e.g. is used in Brake Assistant Systems. System reactions are communicated to the driver by suitable man-machine interfaces.