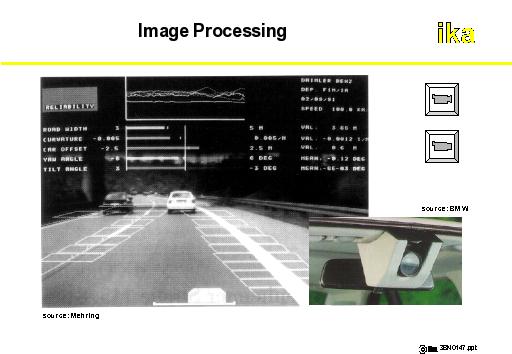
A further system for environmental detection is Image Processing. Using CCD cameras, pictures are recorded, digitised and analysed using Object Recognition. The camera is mostly attached behind the windshield, around the inside mirror. High demands are not made on the quality of their lenses from the point of view of cost, since the pictures need to be reworked anyway by a computer.
The digitised pictures are analysed by a picture pre-processing step. One frequently depends here, on procedures such as Colour Segmenting, which detect colours of similar type. In this way objects are identified on the basis of brightness modification at the object boundary in contrast to the environment.
Various algorithms analyse the digitised picture with respect to vehicles and other relevant objects. They use, in addition, horizontal and vertical lines, which are combined, based on characteristic patterns of vehicles. Distance is usually determined by triangulation and size comparisons of detected objects. The relative velocity of the vehicle is determined from the size and position modifications. The change of perspective due to pitch and roll movement must also be considered.
In image-processing sensors, the analysis can be designed to any complexity. Here special efforts are being made to develop procedures which carry out the picture evaluation as fast and efficiently as possible. This refers not only to the algorithms for scanning, but also to the intelligence used in the selection of the area of investigation. Thus complex approaches, apart from the identification of the objects in 3-D-Space, pursue an additional trace into time, allowing the development of a virtual world in the computer. This virtual world can contain further elements, in sufficient detail, which apart from vehicles and road, is also important from the point of view of driving. On the one hand these elements are available for control, while on the other hand they enable a faster analysis of the present video pictures due to a prediction derived from time.
An image processing system can determine whether the detected object is in its own lane, directly through road recognition, which is particularly advantageous when cornering.
The range of vision of the system corresponds to that of humans. Environmental conditions such as rain, fog or snow accordingly limit the range. Large distances make the resolving power of the digital scan more difficult, usually in the curve prediction. Sometimes in order to improve the resolution here, a second camera with a larger focal length is used. Hence, apart from higher accuracy, the cost of the system continue to rise.
Image Processing generally generates large quantities of data which have to be analysed. This requires high computing capacity, which is presently still expensive. Hence, serial application is still ruled out. As a pure distance sensor, Image Recognition is however of only limited suitability. The indirect method of distance and speed measurement results in inaccuracies, which can become apparent in vehicle control. Range restriction due to pollution is a further problem.