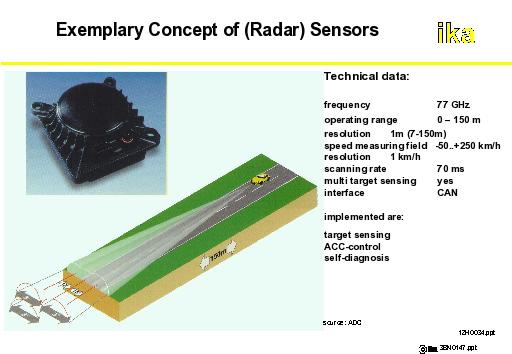
Radar sensors operate with electromagnetic waves using frequencies in the centimetre or micrometer area for detection. The legally prescribed frequency for applications of Radar in vehicles is approx. 77 GHz. In Radar sensors objects are picked up by sending electromagnetic waves and reflecting the same, but over large distances. In the radar measuring technique two principles maybe classified:
The Pulse Radar functions similar to the Lidar sensor where distance is measured based on the time interval between transmission and retrieval of microwave signals. In addition, the speed relative to a vehicle driving ahead can be measured with the Doppler effect. The sensor has multi-targeting capability, since it can recognise the fact that different targets at different distances also show different time intervals and thus a target selection is possible.
The Frequency Modulated Continuous Wave Radar (FMCWR) represents another principle. Here a frequency-modulated microwave signal with constant amplitude is used. For the measurement of relative speed, similar to the pulse radar, the Doppler effect is used. Distance is determined by a frequency modulation. Throughout the signal transmission, the transmission frequency is modulated leading to a variation in frequency between the transmitted signal and the received signal, which serves as a measure of the distance. This principle also allows multi-targeting. In addition however, the wide frequency spectrum must be analysed by Fast Fourier Transformation in a post processor.
The advantages of the FMCW-Radar compared to the pulse radar are at present in the smaller costs due to a simpler construction. However higher demands are made on signal evaluation, since the separation between the determination of distance and that of speed is complex.
Radar detectors are suitable for the detection of objects in traffic, since they primarily localise metallic and aqueous structures. Sharp edges are favourable for detection of vehicles, since they do not transmit the signals away from the sensors by diffuse reflection.
Radar is less sensitive to climatic influences such as rain and snow, in comparison to the Lidar. Also a covered assembly is possible, such as, behind the radiator grille, if no metallic or structured surfaces are situated in the field of operation of the sensor.
In comparison to Lidar Sensors Radar Sensors feature multi-targeting capabilities, which requires a complex analysis by post processors.