The basic technologies for Driver Assistance are represented by Sensors and Actuators. The actuators differ clearly in the respective systems. Therefore actuators are to be discussed appropriately in connection with the different systems.
From the point of view of sensor technology, the detection of the environment is of primary significance. In most systems, it is based on three basic principles: Radar, Lidar or Image Processing.
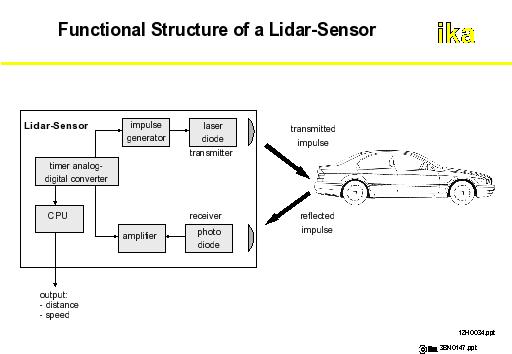
The Lidar sensors which are based on laser technology, use the reflection of transmitted electromagnetic waves for the measurement of distance (ranging). The wavelengths of these waves are situated within a range of 0.78 µm to 1 µm and thus in the infrared range, invisible to the human eye. The measurement of distance between two vehicles is represented by the measurement of the interval of time between transmission and reception of the reflected signal. The sensor requires a free field of view in its wavelength range. Hence, for example, the widely used thermal protection strongly reduces the performance of the sensor. In addition, dirt, rain or fog lead to insufficient reflection which can affect the performance of the sensor negatively.