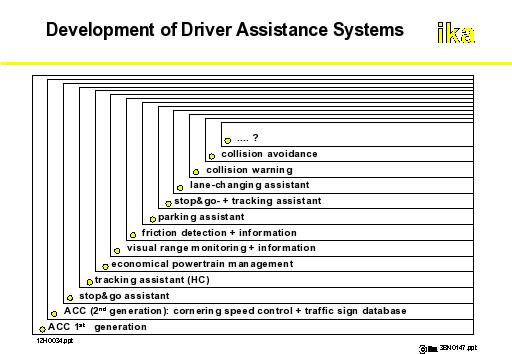
An overview of the development of Driver Assistance is given in the following. At present the so-called ACC system has been introduced in serial production. ACC stands for Adaptive Cruise Control, an intelligent cruise control, which adjusts vehicle speed dependent on the vehicle ahead. A further step in the development of the ACC is expected to take cornering speed into consideration and the selection of speed from road signs.
Since sensors today are not yet able to detect fixed targets (e.g. - Accumulators) as unique relevant targets, the application of the ACC is presently limited to the higher speed range (> 40 km/h approx..). The logical consequence of advancement is a system that also takes over speed control from the driver within the Stop-and-Go range.
A track holding assistant, which varies the steering wheel force dependent on the existing track deviation from the ideal line, represents the first step in transverse dynamic Driving Assistance.
If one links infrastructure-based information e.g. the traffic light network with an ACC, then a selection of speed based on optimum fuel consumption can be achieved.
For the consideration of actual environmental conditions, suitable sensors to determine the range of vision and friction values can be used, which then pass as appropriate information to the driver or directly to the appropriate Driving Assistant for realisation.
A parking assistant which automates the process of a parking, keeping in mind other vehicles, makes high demands on the accuracy of the of the environmental sensor at close range. Hence such a system can be realised only with highly advanced sensors.
The combination of a Stop-and-Go assistant and a lane keeping assistant supports the driver both longitudinally as well as transverse dynamically.
Unlike the lane keeping assistant, which only detects the course, the lane changing assistant detects the entire vehicle environment. In order to guarantee the realisation of lane changing, both the destination lane as well as the existing lane have to be considered. The demand on the environmental sensor technology is accordingly high.
In collision warning the correct interpretation of the situation is of central importance. On the one hand a warning should not take place too early, such that the driver detects no danger and hence does not understand the reaction of the system. On the other hand a late warning leads to dangerous situations and is hence not acceptable.
Based on collision warning, the collision avoidance system executes the necessary driving manoeuvres with the help of active intervention in steering and accelerator/brake. Due to the repeated increase in demand on the sensor technology, actuators are used for the intervention in vehicle control.
The specific time-frame for the introduction of the systems presented here is unfortunately not possible presently. Above all the development of sensor technology sets the time schedule.
In the following section, examples of systems which have been realised are presented after an introduction of basic technologies, on which most driver assistance systems are based. Systems which detect information autonomous to the vehicle, followed by systems which detect their information from the environment are discussed.