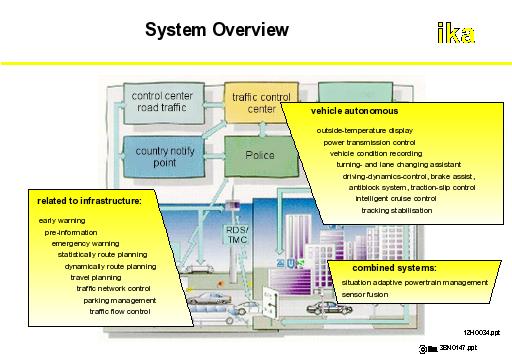
Driver Assistance Systems in the development stage can be divided into two groups: Infrastructure-supported systems and the Autonomous vehicle systems. A combination of both is in addition conceivable.
The approach to acquiring environmental data is considered as the main allocation criterion. Thus in autonomous vehicle systems, the necessary variables for the system function are determined through sensors present in the vehicle. A sensor installed in the vehicle can for example measure the distance and the relative speed of a vehicle driving ahead, so that the necessary information is available for a distance holding system. In infrastructure-supported systems, the information is transmitted by the infrastructure, to the vehicle. Hence for example, information about the speed limit maybe obtained by means of a radio transmission.
In combined systems, the link between the externally contributed data and the internally determined data forms the basis for the reaction of the system.
The realisation is then always taken over by vehicle-side actuators.