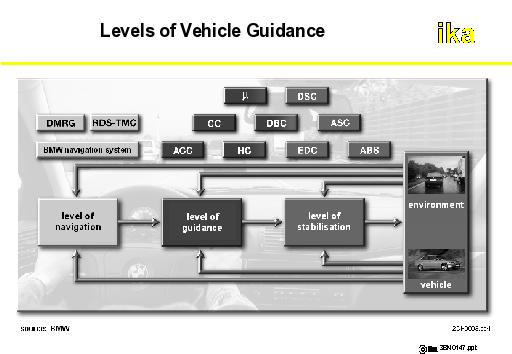
The vehicle guidance can be divided into three further levels: Navigation, Guidance and Stabilization levels.
On the Navigation Level, the driver selects the route he wants to follow within an existing road network. The selected route is mostly fixed in advance, when information of the route system and map information can be accessed. Another important factor for route selection is – if known – the traffic situation, which contains the traffic load or the grade of handicap due to speed limits, road works or the like. While driving, the navigational function then extends to the perception of the necessary information to observe the selected route (traffic signs, directional signs, street name etc..) and if necessary, adjust the route as a consequence of changed boundary conditions.
The driving route is transferred to the Guidance Level. Here the driver adapts his driving style to the road perceived by him and to the surrounding traffic. The Guidance Level thus covers subtasks e.g. tracking, following, overtaking and reacting to road signs. The functions of this level can be divided into transverse and longitudinal guidance. The transverse guidance includes avoiding parked vehicles similar to the lane change. The longitudinal guidance describes the selected speed. The driven speed is mainly set by flow regulation and current traffic status i.e. particularly distance and speed difference to environmental vehicles.
The conversion of the required variables determined on the Guidance Level into vehicle movement occurs in the Stabilization Level. Hence, this level contains the transformation of the vehicle guidance into the lateral vehicle correcting variables such as steering movement, accelerator pedal, brake and gear position. A permanent compensation between the desired values and the actual values of speed and course takes place, in order to correct deviations, e.g. due to cross-winds or slippery roads. For the driver, 'stabilization' implies the avoidance of uncontrolled self-dynamics of the vehicle. Limited factors for drivers' action are drive dynamic data, which are defined through actual interconnection between road and vehicle. To cope the stabilization task it requires cognition of road surface, run of the road and actual own driving state by the drivers.
The time for each task, which is available differs obviously in particular levels. The navigation task can occupy up to several hours depending on information (e.g. search for a route in a foreign city). In contrast, track guidance tasks ( e.g. truck overtaking on the freeway) may last about a few minutes. For stabilization tasks ( e.g. avoidance manoeuvre) often only split seconds are available.
The mental requirements to the driver ascend from navigation level to stabilization level, accordingly.
To support the driver in driving tasks driver assistance systems have been developed. These assistance systems can be arranged in the above three levels accordingly to the supported tasks. E.g. navigation systems can help in navigation level, as well as cruise control (CC) can help in guidance level and anti-skid-system (ASS) in stabilization level. For the sake of completeness further development is listed below. The lecture will go into details.
Navigation Level:
RDS-TMC: traffic information system on car radio
Guidance Level:
ACC: Cruise Control extended with a system to keep distance to a preceding vehicle.
HC: Heading Control, a track holding system, which varies the steering wheel force dependent on the existing position on the track. Larger track deviation offers a larger steering wheel force.
µ: friction coefficient detection, which gives the driver a warning due to descending friction coefficients, which cause changes in drive dynamic boundary conditions.
Stabilization Level:
DBC: Dynamik Brake Control
DSC: Driving Dynamic Control, which supports the stabilization of the vehicle due to specific braking single wheels mainly in curves.
ASC: Traction Slip Control, which prevents too much slip and therefore an unstable driving state due to brake resp. throttle valve engagement.
ABS: Antiblock System
EDC: Electronic Damper Control, which modulates the shock absorber characteristic corresponding to driving state from hard (drive dynamic) to soft (comfortable).