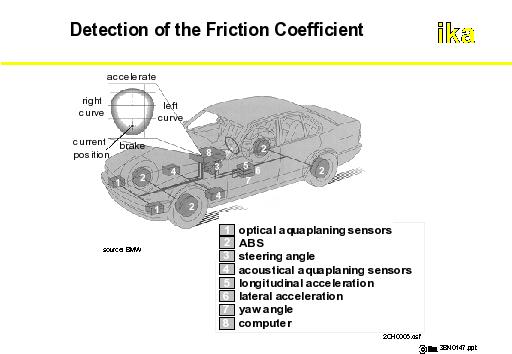
The conditions of friction in a particular driving condition is given by friction monitoring systems. These systems can be based on optical or acoustical sensors.
The identification of road conditions using acoustic sensors can be classified into three conditions: dry, wet and winter-smooth. The differentiation between dry and wet road condition takes place over structure-borne sound sensors mounted on the inside of the wheel-housing. Based on the evaluation of the recorded frequency spectra, wet and dry roadways can be differentiated. An obvious change is the spectrum between 2.5 kHz and 4.5 kHz is noticed. A change brought about by velocity can only be determined by the accelerator amplitude. In that way it is possible to calculate an acoustic water film height specific to a vehicle and speed variation due to measured frequency spectra. In order to record both vehicle sides, sensors are fixed in both front wheel-houses. The macro structure of the road surface also has an influence of the friction value. This can be measured by structure-borne accoustic sensors, similar to wetness. In this case, only the assembly position (rear wheel-house) and frequency window (70 Hz to 120 Hz) differ.
An alternative method of measuring water film heights can be realised by optical sensors. A small infrared sensor and a reflection receiver are placed in the range of the front bumper, which measures the intensity of the reflected light from the road surface. In addition, the amount of infrared light that is dispersed by the road surface in other directions is measured by a scattered light receiver. Scattered light can only be detected on a rough and dry road. Hardly any light is scattered on a wet road, since the dispersive peaks and troughs are covered by water. The larger the extent to which these edges and troughs are covered by water surface, the lesser is the scattered light which can be measured, hence higher is the water film.
In order to transfer information regarding the conditionof friction directly to the driver, a so called "haptic accelerator pedal" can be used. Here a resistive force against the driver's foot force is increased when a safe acceleration or speed is exceeded. In fact, an automated throttle valve engagement is possible although it is undesirable from the point of view of company philosophy.