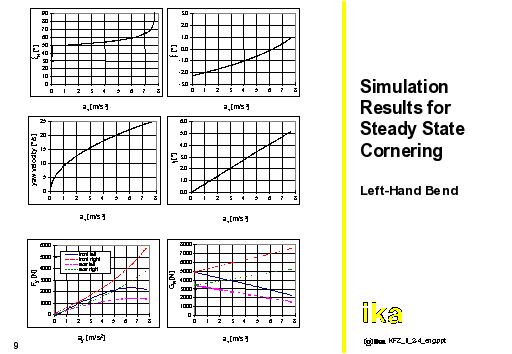
The main objective of steady-state cornering is to determine the steering-wheel angle as a function of lateral acceleration ay. The initially linear and then progressively increasing steering-wheel angle together with increasing lateral acceleration is characteristic for the steering wheel angle function in the 0-version. That is, the zero version displays an increasingly understeering steady-state steering behavior as lateral acceleration increases.