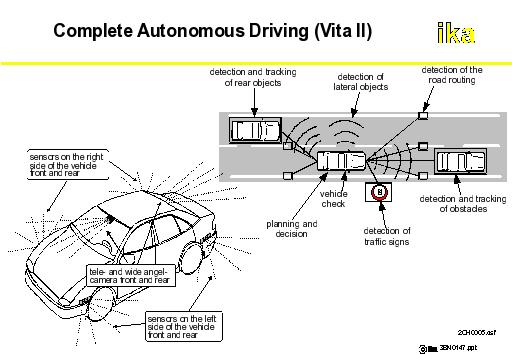
An Ideal Autonomous System for automatic driving is represented in the context of VITA II (VIsion Technology Application), a vehicle presented by PROMETHEUS. This vehicle is equipped with extensive technology, which analyses the entire surrounding environment. Based on the environmental sensor, suitable driving manoeuvres are initiated in order to avoid accidents. In the following section, one deals with the individual components of this vehicle more in detail.
The steering wheel position, steering moment, acceleration and velocity can be adjusted using actuators present in this vehicle. While one depends on proven actuators for the longitudinal dynamics which are applied in conventional Cruise Control, the steering actuators for serial application are still in the development stage.
In order to be able to control the vehicle based on the situation, the central computer needs specifications concerning the actual driving status and the surrounding environment. The driving status is thus monitored by the assistance of the following sensors:
Brake pressure,
Steering angle,
Transverse and Longitudinal acceleration,
Yaw angle rate,
Engine speed and vehicle speed.
For the coverage of the traffic in the surrounding environment, the VITA II has altogether ten cameras. The details are as follows:
4 colour cameras in driving direction,
2 colour cameras opposite to the driving direction,
4 black-and-white camera blocks for monitoring the sides.
Two of the cameras in the driving direction and two in the opposing direction maybe swivelled, in order to be able to cover sharp curves or traffic signs.
In order to be able to achieve the desired driving manoeuvres from the Videos, the following perception modules must be examined:
The road recognition and following covers the relative position of the vehicle to the lane as well as to curves in the road.
The object recognition and following detects and pursues targets in front of and behind the vehicle. As a result the distance and the relative velocity of a maximum of five covered targets are determined. The vehicle recognition is differentiated from the pure object recognition. Up to three vehicles can be covered simultaneously.
The lateral object recognition enables the positioning of neighbour vehicles, which is a necessary prerequisite for safe lane changing.
Another module detects hurling vehicles in the surrounding field.
The sign recognition detects the beginning and end of speed limits and overtaking prohibitions. Colour plays an important role in the correct recognition of the signs.
With the help of these perception modules, based on the situation, the driving manoeuvres such as track holding, distance holding, speed control, lane changing, overtaking and collision prevention can be initiated on a three-lane highway.
The detection of surrounding objects as well as the course of the road and the sign-posts leads to an appropriate reaction of the vehicle through the Planning and Decision levels of the system. Hence finally ideal automatic driving without information from the outside is conceivable.
The driver controls the system via the commercial Cruise Control, with which the system can be switched on or off and the speed increased or reduced. For this vehicle which is still in the research stage, information monitors are mounted on the instrument panel and in the rear view mirrors.
The possibility for the extension of the system to infrastructure-supported information e.g. through beacon systems is already being applied in development. The sensitive sensor technology maybe considered as one of the limitations of this system. Perfectly automatic driving requires an accurate coverage of traffic in the surrounding environment, which cannot yet be achieved on the basis today's image processing systems at an expenditure justifiable for serial production.