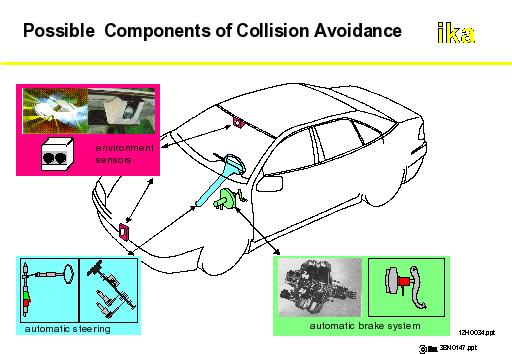
A collision avoidance system interprets traffic conditions using the environmental sensor technology. If an accident can be avoided only by braking, possibly in combination with an evasive manoeuvre, then the system detects this and initiates the appropriate manoeuvre without driver intervention.
The environmental conditions maybe detected by a combination of different sensors such as Image Processing sensors for the interpretation of the situation and Radar or Lidar sensors for the coverage of the characteristics of the surrounding vehicles. The principle functionality of Sensor Technology corresponds to that already described previously. However, due to the safety relevance of the system the recognition must be error free, which then clearly increases the demand on efficiency.
A steering manoevre maybe carried out as represented by the sectional view of the steering column. Also a pure ' Steer by Wire ' is just as conceivable as the control of the steering by the variation of pressure in the power steering.
The electronically adjustable brake booster represents the automatic brake. A simpler possibility for implementation consists of a hydraulic cylinder, which is inserted between the brake pedal and brake booster as a consequence of which the foot braking force of the driver increases. Alternatively an electrical brake is also conceivable in the form of the so-called ' Brake by Wire' system.
In emergencies, since the system overrides the driver's reactions, every individual component has to be designed in a failsafe manner. A certain safety relevance is given. Further, problems exist in the strategy of the reaction of the system in different situations. Hence the system maybe accepted, only strategies that are understandable from the point of view of the driver are selected. From a legal point of view, the system takes over control of the vehicle in emergency situations and hence claims responsibility for vehicle guidance.