The target of this system is it to emulate the behaviour of a "standard driver". If a driver clearly deviates from the desired standard course, the system attempts to make a correction in his steering input. There are various approaches to achieve this:
A steering moment or yaw angle proportional to the deviation of the vehicle from the optimum position is added to the steering wheel. This can be achieved by means of a electrical servo-motor integrated into the steering column.
A small actuator is added to the steering column which adds a small correction angle to the steering angle given by the driver.
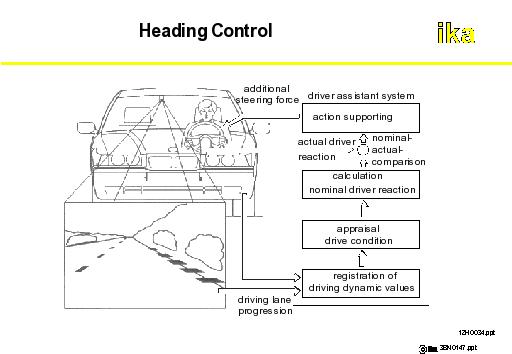
The actually driven course in reference to the lane is determined with the help of a simple image processing system. Infrared sensors which analyse the reflection of road markings are another possibility for the recognition of the track.
By means of certain other parameters (e.g. side slip angle, angular rate of yaw, yaw angle error) the actual driver reactions can be compared with the ideal reactions based on the lane along with the dynamic parameters. As a result, the necessary additional steering force can be calculated.
Investigations show that the system is accepted by drivers and that it is found to be stress relieving. The preferred versions of the system are those where the system reactions correspond as closely as possible to the driver reactions.
An extension of the system to an automatic track holding system without necessary driver intervention is conceivable by increase of the steering forces by the system. The present limitations in image processing however permit only an assistance.
A simple system which warns the driver on leaving the track, will be introduced in trucks made by DaimlerChrysler in the USA this year. This system is based on a simple image processing system.