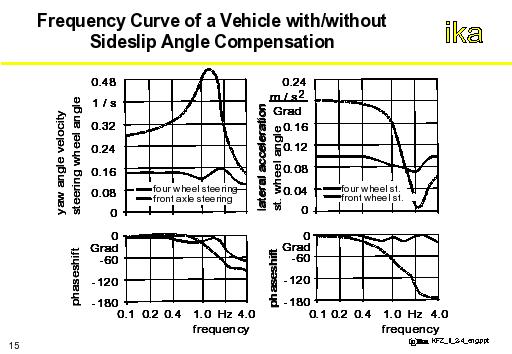
The figure shows the effect of vehicle side-slip angle compensation on the transient steering behavior of an automobile on the basis of simulation results of sinusoidal steering.
Driving speed is v = 150 km/h. The amplitude of the steering-angle was set in order to achieve a lateral acceleration of ay = 4m/s2 for steady-state cornering at v = 150 km/h.
In a vehicle with additional rear-axle steering, a larger amplitude of the steering-angle is required, since a lower yaw-amplifying factor results from the unidirectional steering of the rear wheels simply because of the geometrical relations. The amplitudes of yaw rate and lateral acceleration relative to the steering-angle amplitude are hence lower. This could be compensated by a more direct steering ratio on the front axle.
A vehicle without rear-axle steering shows a distinct resonance peak in the amplitude of the yaw rate in the range of the yaw natural frequency (ca. 1.1 Hz). This points to low yaw damping (due to the high driving speed; see section 2.3.2). The low yaw damping results in after-vibration of the vehicle following steering movements of the driver, which affects driving stability.
In the same vehicle, but with rear-axle steering, the amplitude of the yaw rate is almost independent of the excitation frequency of the steering input. Yaw damping is sufficient enough to adequately damp the yaw oscillation excited by the driver's steering inputs. Yaw excitation is thus less intense in a vehicle with rear-axle steering.
Moreover, the minor phase difference between a steering input and the change of lateral acceleration, i.e. change of course of the vehicle, has a very positive effect on vehicle handling. At a steering frequency of about 1.1 Hz, a value associated with a fast lane-changing maneuver, for example, the change of course and the change of steering-angle in a vehicle without rear-axle auxiliary steering shows a phase shift of about 90°. At the moment when the driver has already turned the steering wheel into the straight-ahead position, the vehicle will just about have reached its maximum lateral acceleration or change of course. The vehicle will change its direction of motion although the driver is no longer steering. This effect is perceived as a "push". In a vehicle with rear-axle auxiliary steering however, the phase shift at this steering frequency amounts to only about 15°.
In addition to the control strategies of the nature described for rear-axle auxiliary steering systems, other control strategies which incorporate the rear-axle steering system in a closed loop for the regulation of desired values of driving dynamics are conceivable. The yaw rate control system in the VW research vehicle IRVW4-Futura /34/ serves as an example. Since these concepts are however of little practical relevance, they will not be dealt with in greater detail.