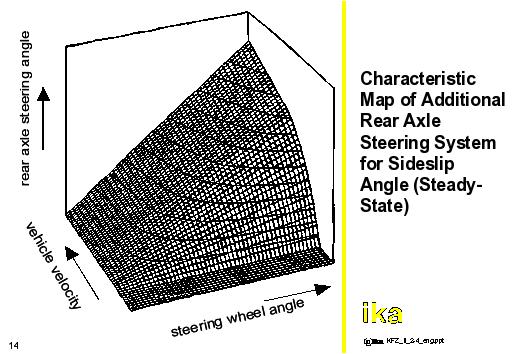
The figure gives a qualitative representation of the derived "self-steering characteristic" for steady-state driving conditions (only positive vehicle side-slip angles are compensated).
The vehicle side-slip angle compensation for transient driving conditions also requires a certain time response of its control.
In real vehicles, the influence of the nonlinearity of the tire characteristics, the wheel-suspension kinematics and so on, must be considered. Instead of an analytical approach, a corresponding self-steering map would have to be experimentally determined.