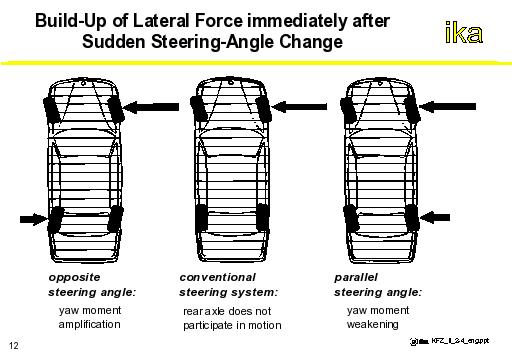
In a vehicle without rear-axle steering, a lateral force is initially built up only on the front axle as a result of a quick steering movement by the driver.
Only when the vehicle responds to the excitation with a lateral motion and yaw, will a slip angle also be created on the rear axle. A lateral force will then be built up on the rear-axle which will result in a further increase in lateral acceleration and reduce yaw acceleration to zero (state of equilibrium of steady-state cornering).
In a vehicle with opposite steering on the rear wheels, oppositely directed lateral forces are built up on the front and rear axles immediately after a steering-angle change. The resulting lateral acceleration at this point is hence lower while the yaw acceleration higher than in a vehicle without rear-axle steering. Accordingly, a quick increase in yaw rate is to be expected, which will cause a distinct overshoot, while lateral acceleration will be slower in reaching its steady-state final value.
A more favorable steering response with regard to driving stability involves a quick increase in lateral acceleration in combination with a minor overshoot of yaw rate. This can be achieved if lateral forces are built up on the front and on the rear axle immediately after the steering-angle change, these forces being directed towards the inside of the curve, i.e., using a unidirectional steering angle on the rear axle.