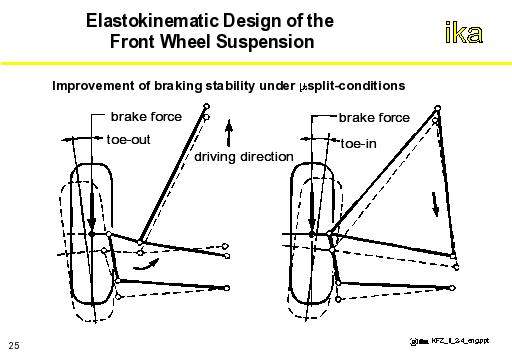
→µ-split conditions can also be compensated by the elastokinematic design of the front wheels.
→During braking, the front wheel on the surface of higher friction should be elastokinematically led into toe-in.
→This way a countersteer is initiated even before the driver reacts to the µ-split condition, resulting in the vehicle being stabilised.
→However, the fact that an elastokinematic toe-in also leads to the vehicle veering into corners has to be taken into consideration.