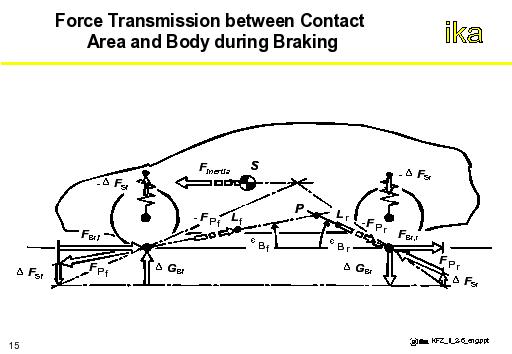
The figure shows the relationship for braking.
→The intensity of brake dive depends on the position of longitudinal centres.
→Brake dive can be completely compensated when the resultant of horizontal braking forces and the wheel load difference, passes through the longitudinal centre.
→This is difficult however to realise for design reasons.
→The braking support angle ε describes the measure of brake dive compensation realised.
εstat describes the measure of compensation realised by suspension design.
The optimum support angle εopt corresponds to the angle between the line of action of the resultant Fres in the tire contact center and the horizontal.