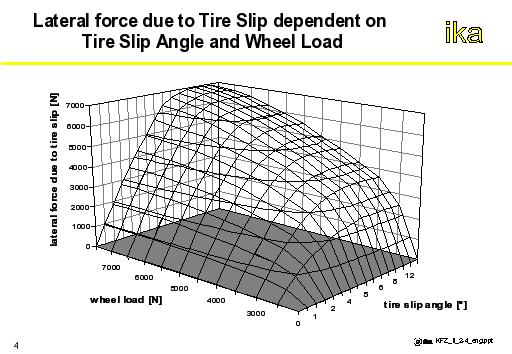
The tire performance maps, on which the calculations are based, is shown.
An approximate consideration of transient tire behavior for quick variations in the tire slip angle is achieved using a 1st order delay for the tire slip angles. The delay time is calculated in relation to a specified run-in period of the tire and the instantaneous wheel circumferential speed.
Wheel caster is considered using a predetermined map, from which the aligning torque around the normal to the road through the axis of rotation of the wheel is obtained by interpolation based on the instantaneous wheel load and the slip angles.
The steering inputs required for the simulation are specified as time functions or set via a PID controller in relation to a specified desired course. Traction forces are also specified as a time function, so that a characteristic for the desired velocity is obtained.
ADAMS hence allows the calculation of vehicle motion during the most diverse driving maneuvers and offers the advantage of the variations of the vehicle parameters with relative ease within arbitrary limits, in contrast to driving tests.