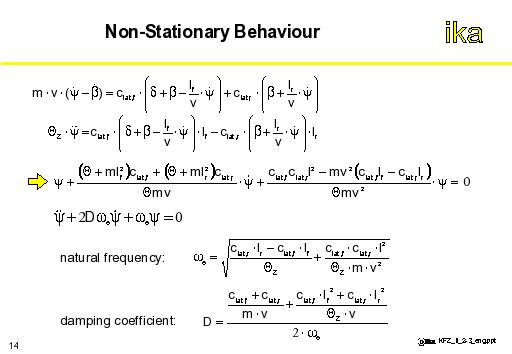
In order to make statements about the transient behavior of road vehicles, the equations of motion introduced earlier for the linearized single track vehicle model are substituted into one another and the results are shown above.
The equations for the natural frequency and damping co-efficient are indicated.