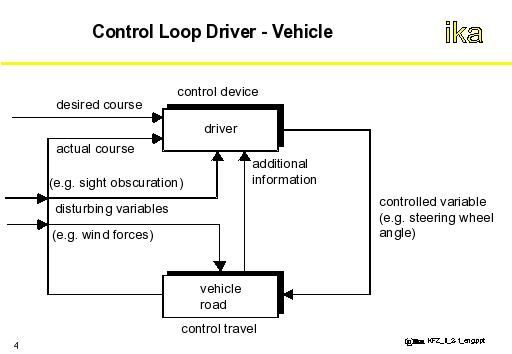
In the last of the three functions, the human being undertakes function of a control device from the point of view of driving stability. The vehicle represents the control loop, such that the interactions between driver intervention and vehicle response can be understood as processes in a closed control circuit.
In this control loop, disturbing variables act on the driver (e.g. relative motion driver - vehicle, sight obscuration) and on the vehicle (e.g. crosswind, road irregularity). The steering wheel angle particularly represents the controlled variable with respect to the vehicles transverse dynamics. A deviation in control is noticed by the driver as a difference between the desired course and the actual course.
The closed control loop is a dynamic operating system. Due to the limited possibility for the adaptation of the control device "driver", the system substantially depends on laws of vehicle behavior, if the overall driver - vehicle system remains stable from the point of view of course holding when large deviations have to be compensated quickly and under the influence of disturbances.
Control loop = dynamical system
possibilities of adaption of control device "driver" limited
Steady course holding when eliminating large course deviations quickly: