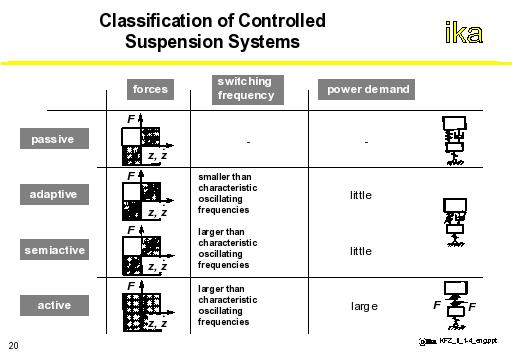
In addition to the "conventional" methods of influencing suspension behavior dealt with so far, "unconventional" solutions are being presented below. In contrast to passive systems, the force F acting here on the body does not depend on a single characteristic of the compression travel z and the compression rate of the suspension elements. The figure presents a summary of regulated suspension systems. Adaptive systems, unlike the passive system, can switch between various component characteristics. However, here as in passive systems, the direction of the force remains determined by the signs of compression travel and compression rate.
In the semiactive state, the switching frequencies are larger than the characteristic vibration periods of wheel and body. This allows the possibility to switch from one characteristic to another at such speeds that every intermediate operating point can be achieved dynamically.
Adaptive and semiactive systems only need energy for the control of actuators and the electronics.
Only in the case of active suspension can the force F between body and wheel become independent of the compression movement of the wheel. The actuating force however, requires external energy supply.