At the 'Institut für Kraftfahrwesen' the submicroscopic traffic simulation program PELOPS (Program for the dEvelopment of Longitudinal micrOscopic traffic Processes in a Systemrelevant environment) was developed in co-operation with the BMW PLC. The idea of PELOPS is a combination of technical vehicle and traffic models, that permit with a high degree of detail, investigations concerning the longitudinal dynamics of vehicles as well as an analysis of the course of traffic. The advantage of this combination is the opportunity to take all interactions that occur between driver, vehicle and traffic into consideration. An important basis for the realisation of this idea is the fact, that computer capacity was significantly optimised over the last years. Without this capacity, the required degree of detail with a simultaneous consideration of all influencing factors would be unthinkable.
PELOPS is oriented towards the fundamental elements of traffic, namely route and environment, driver and vehicle.The route model bases on the presentation of the altitude profile with gradients, bumps and depressions, further on the presentation of the curves with straight stretches of road, arcs of a circle and transitions from a straight route to a curve, as well as of the number of lanes with the respective lane widths. In addition to the geometrical course of road, the sign posting and the environmental conditions define the condition of the route. The route-model covers the entire range from motorways through to urban roads, including e.g. intersections and traffic-lights. The marginal conditions of traffic result from instructions concerning the number of vehicles that drive on a certain part of the route with a defined length (traffic density) as well as the starting speeds and the distances between the vehicles (traffic flow). To produce certain courses of traffic or to instruct vehicles with calculated load profiles, single driver-vehicle-units may also be moved according to specific driving speed profiles. From the point of view of investigations on individual vehicles, this can be realised by means of standardised driving cycles, such as 'EUDC', 'FTP-75' etc. or in traffic investigations by means of emergency braking, a constant drive etc.
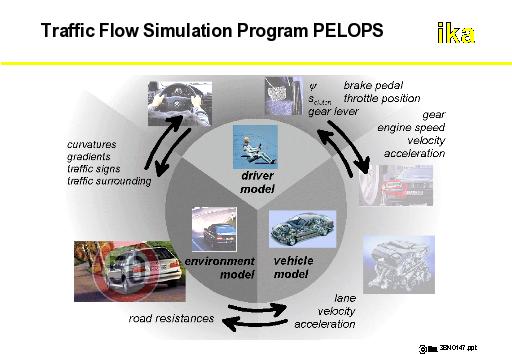
The vehicle model is based on the 'cause and effect method', which means that the order of calculation is based on a typical operating point of the engine (speed and load) transferred over the clutch, transmission and differential upto the wheels, where the driving and resistive powers are balanced. The operating point can be shifted by altering the load (cause) which is set by the driver, which leads to a change in power and therefore to a change of the engine speed (effect). The behaviour of the engine is described by engine maps. The transmission designs simulated include a conventional manual and an automatic transmission model with a hydrodynamic converter. At the transmission output, the model of a retarder is used for the simulation of trucks. The presentation of the vehicle in this manner according to the cause and effect principle makes the analysis of autonomous vehicle systems (intelligent cruise control, ABS, etc.) possible.
The driver model presents the connecting link between a plain vehicle- traffic simulation. It is divided into a 'behaviour' and a 'handling level'. On the behaviour level, a driving intention is determined based on a typical driving condition and traffic environment and includes such operations as acceleration, choice of lane and gear and a strategy-level for reacting to interesections, traffic-lights etc. To ascertain the driving intention, PELOPS works with a psycho-physical distance model, which divides different ranges of driver behaviour by means of reception thresholds. On the handling level the respective intention of the driver is transformed in a way that positions of control elements are calculated. In this respect the accelerator and brake pedal are combined into a drive pedal. The operation of the drive pedal is realised according to a PI-control algorithm. The change of gear takes place under time control; in this case every driver is given individual times for the gear change. Lane changes are deduced from the crosswise dynamic. The vehicle is moved alongside a sinusoidal curve from one lane to the next. The shape of the curve depends on the kind of lane change, which is again specifically computed for each driver and vehicle.