Transmission Layout
The size of a specific gear ratio depends on different criteria. The largest gear (the gear with the smallest ratio) is generally designed with respect to the maximum attainable vehicle speed. The axle multiplication is determined in such a way that the gear which is statistically most frequently used in driving, can be designed as a direct gear (i=1). This implies that the input and output of the stepped transmission are directly connected with each other by a positively-engaged clutch provided that this is made possible by the transmission design. Due to the direct engagement, mechanical losses drop to a minimum.
The ratio of the smallest gear is determined by the maximum desired torque required at the driven axle, e.g. for the vehicle's climbing ability and the smallest possible driving speed with an engaged clutch.
In the selection of the intermediate gear ratios, the stability criterion has to be considered at first.
It has to be guaranteed here, that the transmission ratios are selected in such a way that in the limiting case, i.e., when the maximum torque on the engine characteristic line in the gear (z) is reached, it should be possible to shift to the preceding smaller gear (z-1). This should be possible without exceeding the permissible maximum speed nperm of the engine.
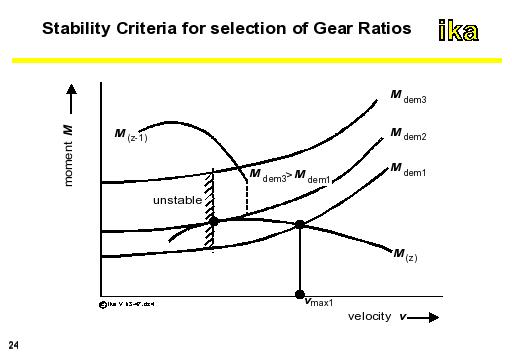
For example, if a vehicles moves in the gear (z) with the maximum possible speed vmax1 (point of intersection of the demand curve Mdem1 with the supply curve M(z)), a higher engine torque can be provided in order to cover the increasing torque demand, e.g. on a gradient, by decreasing the engine speed.
If the demanded torque exceeds the maximum transferable torque at the wheel, it should be possible to shift into the next smaller gear (z-1) before the unstable area at the contact point of the delivery characteristic M(z) with the demand characteristic Mdem2 begins. In the unstable area, at a decreasing speed, the drop in speed or velocity is amplified by a simultaneously dropping torque supply.
The stability condition is thus called:
vMmax(z) α vnperm(z-1)
For the ratio of the multiplications i of two neighboring gears (z) and (z-1), the so-called step jump αG, is defined.
The maximum possible step jump results from the stability condition.
In case of engines that reach their maximum engine torque already at lower speeds, a large step jump and hence a low number of gears can be realized. In today's vehicle power plants (reciprocating internal combustion engines) αGmax is within the range of 1.5 to 2. Assuming that the maximum speed is just slightly larger than the nominal speed, this value corresponds more or less to the speed elasticity. Conversely, it can be deduced from this, that engines with a high speed elasticity enable large step jumps and thus a smaller number of gears. It has to be considered, however, that the stability criterion is only insignificantly important in the case of highly motorized passenger cars. With commercial vehicles it is often desirable to choose considerably smaller gradations.