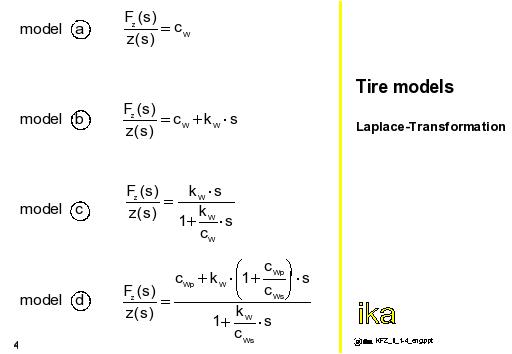
In the simplest case the tire can be modelled as a linear spring (a). The tire damping mentioned in an earlier chapter is considered in the models after Voigt-Kelvin (b), Maxwell (c) and Gehmann (d).
Below, the four modeling approaches will be compared with regards to their dynamic behavior. For this purpose, the Laplace transformations of the four models are presented in the frequency domain.