In contrast to systems explained so far, which gather their information over vehicle interior sensors, the following systems require information from the environment, such as navigation systems, which require information from satellites.
The determination of actual position and navigation to the destination are taken away from the driver by support of a navigation system. The navigation to the destination using a navigation is based on at least three systems: digital roadmap, positioning and computational models.
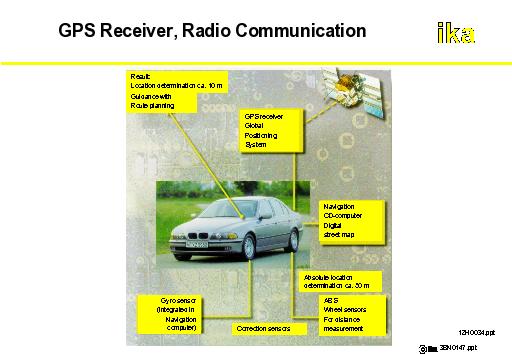
At a level of 20200 km presently 24 satellites are situated on six levels of the orbit. These satellites have a time of circulation of 12 hours and continuously transmit radio signals with their own positional data. A GPS receiver (Global Positioning System) in the vehicle analyses the signals of three GPS satellites, so that out of these signals actual positioning with respect to longitude and latitude takes place. This principle depends on the measurement the time elapsed between the transmission and reception of the signal from the satellite to the receiver. By means of cross bearing due to defined correlated satellite positions and their explicit signals, the positioning of a GPS receiver is possible for implementation offshore, in water and in air. If in addition to the three satellites, a forth one is evaluated, GPS positioning in space is enabled (x, y, z coordinates).
These coordinates are transmitted to a digital roadmap, through which the actual position is indicated within an understandable frame of reference for the user. Due to generated inaccuracy for signal preparation in civilian use an error in positioning the vehicle from 35 m upto 100 m is incidental. This value is too high for accurate navigation in a dense road network in congested areas. For this reason navigational instruments are coupled to wheel sensors of ABS, which receive information about covered distances. Beyond this, the system has to be informed about changed directions of the vehicle (e.g. by an electronic compass) to specify the correct position of the vehicle on the roadmap. This enables replication of the driving route on the display of the route guidance system. With this technical equipment accuracies up to three meters are enabled.
A more exact positioning can be reached by an alignment of radio signals with the assistance of a reference transmitter, where position is measured very precisely. Such a long wave transmitter exists in Frankfurt/Main. It transmits every three seconds a correcting signal. Station's received respectively calculated position data are compared with actual and known position data and processed to a correction value. This signal can be received throughout Germany by a therefore needed DGPS receiver (Differential GPS).
Due to entering the target location, the system calculates an optimal route chosen by different criteria to lead the driver with audio or graphic output. With a combination of further data e.g. of park guidance systems or traffic jam detectors the route can be suited during driving to variable boundary conditions with regard to different aspects (free parking space, quickest driving time).